




Simulation Troubleshooting
As of August 5th, 2025, Golaem will no longer provide direct support.
All support for Autodesk Golaem will now be handled exclusively through Autodesk support channels and this website will be deactivated soon.
Please bookmark the Autodesk Golaem Support section for any future support needs related to Autodesk Golaem packages.
At the simulation initialization, several configuration troubles may occur. In addition to the Maya Script Editor History, the Behavior Editor is here to help resolve these issues. Feedbacks are shown in the Behavior Editor main workspace, and in the status bar when a Behavior is selected.
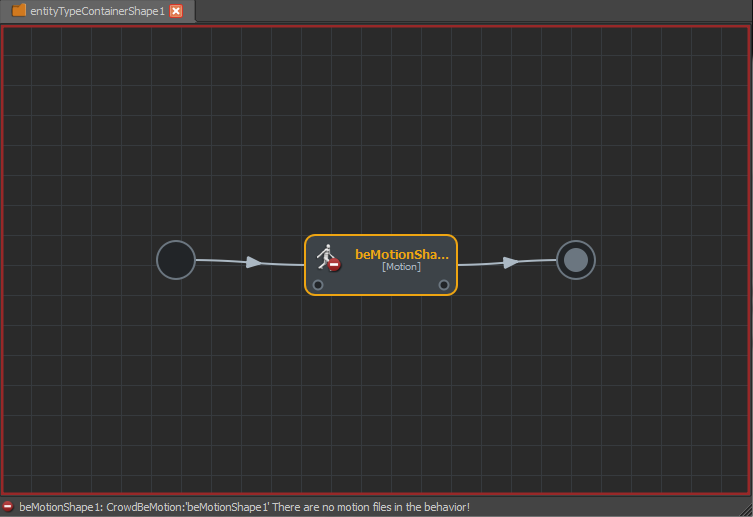
Feedback levels
Four feedback levels are handled in the Behavior Editor, an overlay icon related to the Behavior status is shown on top of the Behavior Icon.
| Valid | No icon | the simulation initialization was computed without any issue and is able to run |
| Warning |  |
the warning Behavior is able to be run but may occur some unwanted side effects during the simulation.  Warning raised by a beMotion
Example: a beMotion without any Motion Mapping File when the Motion Mapping Mode asked one
|
| Error |  |
the Behavior is not able to be run and will be removed from the simulation.  Error raised by a beMotion
Example: a beLocomotion without any Animation Files
|
| Critical | |
the simulation is not initialized, an unexpected critical error has occurred and stopped the simulation. Example: a missing link in the Behavior Graph cannot be handled and must be fixed by the user
|
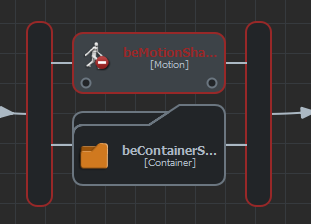
Notice that Behavior Containers, Parallel Operator and No Order Operator status depends on children status. It means that if a child Behavior has raised an error, the parent Behavior Container will also tagged as in error. In this case the Behavior Container will not be removed from the simulation, only the failed child Behavior.
Recover the simulation
To recover the simulation, configuration troubles must be fixed and the simulation restarted.