




Crowd Rigid Body
As of August 5th, 2025, Golaem will no longer provide direct support.
All support for Autodesk Golaem will now be handled exclusively through Autodesk support channels and this website will be deactivated soon.
Please bookmark the Autodesk Golaem Support section for any future support needs related to Autodesk Golaem packages.
CREATION
- Golaem Shelf:

- Golaem Menu: Crowd Rigid Body
- MEL command: glmCrowdRigidBodyCmd;
If a DAG Object is selected when the Crowd Rigid Body is created, it will automatically use this DAG object as source of the In Transform attribute. If several objects are selected, only the first selected object is used.
When a Crowd Rigid Body is created it is automatically added as a collider to the Crowd Manager Physics Locator.
CONFIGURATION
General Attributes
| In Transform | A Maya DAG object which gives the position / orientation / scale of the collider. If none are specified, the position / orientation /scale of the Crowd Rigid Body will be defined by its transform. Notice that only the position and the orientation of the Crowd Rigid Body can be animated (the scale value is only read at the scene initialization) |
| Set Initial State |
This button allows to record the initial state of the Rigid Body. The initial state of the rigid body is the position/orientation at which it will be put when the simulation starts. |
Even when the Rigid Body is intended to be used without a Maya object, the In Transform plug should be connected to another Maya object (at least a locator). The Rigid Body transforms won't be used directly.
Rigid Body Attributes
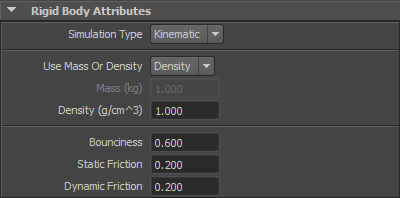
| Simulation Type |
|
| Use Mass Or Density / Mass / Density | Mass or the density |
| Bounciness | Bounciness coefficient |
| Static Friction | Friction when the Rigid Body is at rest |
| Dynamic Friction | Friction when the Rigid Body is in motion |
The Simulation Type attribute can be keyframed to change the physics mode during simulation.
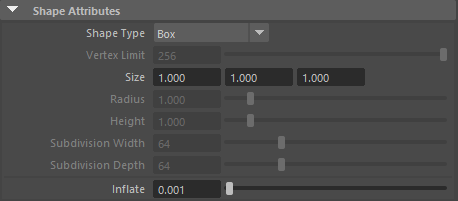
Shape Attributes
Note that if the Rigid Body is linked to a Mesh with the In Transform plug, these values are automatically linked to the source object properties (size if it's a polyCube, radius and height if it's a polySphere or a polyCylinder, mesh vertices if it's a mesh, and color if it's any of these)
| Shape Type | Collision shape type, can be Box, Sphere, Capsule, Convex Hull, Triangle Mesh or Heightfield. If the shape type is set to Triangle Mesh, the collision trigger part will work with the Convex Hull. If the shape type is set to HeightField, there will not be collision trigger nor in viewport display |
| Vertex Limit | If the Shape Type is set to Convex Hull, it specifies the maximum number of vertices to use for the convex hull |
| Size | If the Shape Type is set to Box, it specifies the length, width and height of the shape |
| Radius | If the Shape Type is set to Sphere or Capsule, it specifies the radius of the shape |
| Height | If the Shape Type is set to Capsule, it specifies the height of the shape |
| Subdivision Width | Number of subdivisions to use for the heightfield |
| Subdivision Depth | Number of subdivisions to use for the heightfield |
| Inflate | Inflate the shape |

| Collision Id | Id that is used by the Physics Collision triggers to filter collisions on rigid bodies |
| Collision Color | Color that is used by the Physics Collision triggers to filter collisions on rigid bodies |
The Id and Color attributes can both be keyframed to change value during simulation.
The color is automatically linked to the object's material color if it exists. \>
Advanced Attributes

| Use Kinematic Target | When the Simulation Type is Kinematic, this change the way the Rgid Body transforms are updated in the physics world. If checked, the collisions between the ragdoll and dynamic objects in the scene will be more accurate, but can be too strong, especially when colliding with light objects. If not checked, collisions will be softer, but some collisions wight not react correctly with fast objects. |