




Channel Operator
As of August 5th, 2025, Golaem will no longer provide direct support.
All support for Autodesk Golaem will now be handled exclusively through Autodesk support channels and this website will be deactivated soon.
Please bookmark the Autodesk Golaem Support section for any future support needs related to Autodesk Golaem packages.
A Channel Operator Behavior (beChannelOperator) allows to process input values and output the results in some channel values through a graph of Channel Operators nodes (ChOps). Check out the Channel Operators documentation for more details about this graph.
Creation
-
Behavior Editor / Behavior Library:

- Golaem Menu: Crowd Behaviors / Behaviors / CrowdBeChannelOperator Node
- MEL command: glmCrowdBeChannelOperatorCmd;
Configuration
Presets
Some presets are available with the Channel Operator Behavior. These presets will create the complete graph of channel operators to do specific operations. The built graph may then need to be configured properly.

 |
Set PP Attribute Preset: will create a graph of channel operators that mimics the Set PP Attribute Behavior |
 |
Set Bone Preset: will create a graph of channel operators that mimics the Set Bone Behavior |
Channel Operators
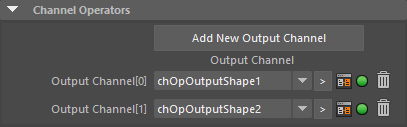
| Output Channel |
List of output channels that are used by the behavior. Click on the combo box to select another existing output channel, on the right arrow to select the output channel node. |
 button to open the Channel Operator graph for this Output Channel in the
button to open the Channel Operator graph for this Output Channel in the Visual Feedback
The Channel Operator Behavior Visual Feedback shows the value of each Channel Operator that contribute to the output value.
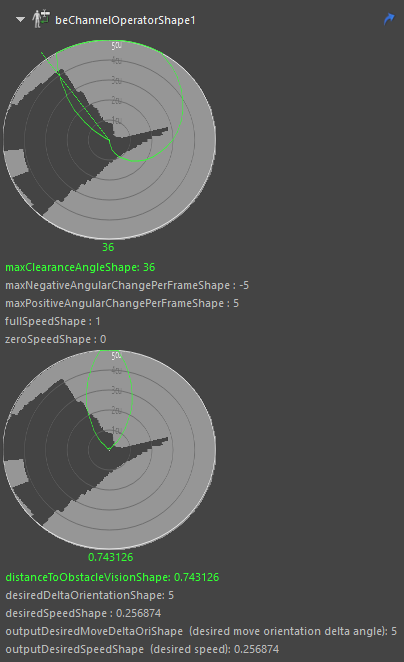
Attribute Visual Feedback of the Channel Operator Behavior
The Channel Operator values are displayed in the order of evaluation.
The ChOpSensorInput have a specific display that shows the actual vision of the selected entity: the base caneva is the same than in the attribute editor, and the grey area is the part is is actuallt occupied by perceived obstacles. When the sensor is in clearance mode, it also display the angle at which the max (or min) clearance value is detected.