




Perception Locator
As of August 5th, 2025, Golaem will no longer provide direct support.
All support for Autodesk Golaem will now be handled exclusively through Autodesk support channels and this website will be deactivated soon.
Please bookmark the Autodesk Golaem Support section for any future support needs related to Autodesk Golaem packages.
The Perception Locator defines the perception environment of a crowd simulation. It is used by the Activate Sensor Behavior and the Navigation Behavior. All objects that can be detected by sensors are added to the perception environment.
A Perception Locator can be mapped to one or several Crowd Fields (directly or through the Crowd Manager Node). When a Perception Locator is shared among several Crowd Fields, the crowd simulations share the same perception environment, i.e. this environment will contain objects from all the aforementioned crowd simulations. If two Crowd Fields use different Perception Locators, entities from one Crowd Field won't detect objects from the other one and vice-versa.
Creation
A Perception Locator is automatically created when an Activate Sensor Behavior, a Navigation Behavior or a Sensor Locator is added to the scene.
- Golaem Shelf:
 / right click / Perception Locator
/ right click / Perception Locator - Golaem Menu: Environment Locators/Perception Locator
- MEL Command: glmPerceptionLocatorCmd
Configuration
Default Navigation Sensor Attributes
These parameters allows to edit the Default Sensor used in Navigation Behaviors
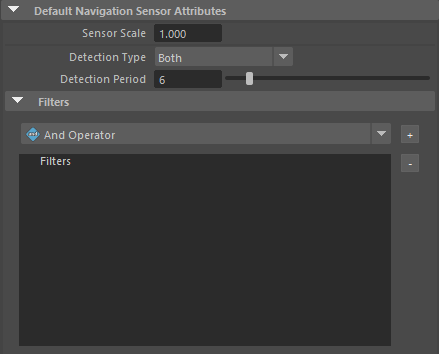
Those attributes are similar to the ones in the Sensors, please check their descriptions Sensor.
Display Attributes
These parameters define how the Perception Locator is drawn in Maya's viewport.
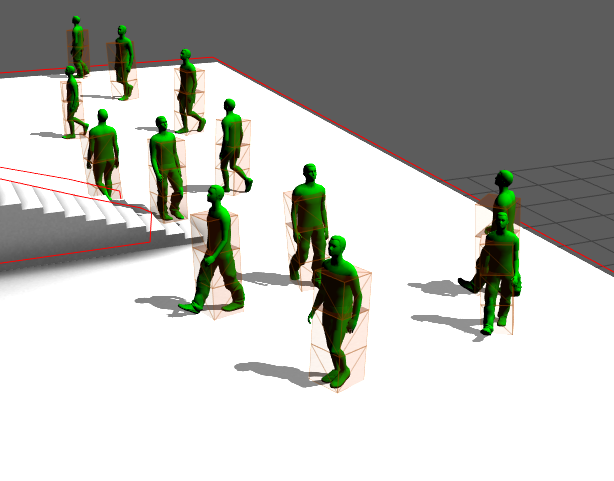
Perception Locator with Display Entities and Display Obstacles enabled
| Display Entities | Draws the Perception Shape voxels of each entity in the perception environment |
| Display Obstacles | Draws all the navigation obstacles in the perception environment |
Statistics
These parameters cannot be set manually. They only offer statistics for the Perception Locator.
| Entity Count | The number of crowd entities in the perception environment |
| Obstacle Count | The number of navigation obstacles in the perception environment |